Fiat Linea Konsol Tuşu ile Cam İndirme ve Kaldırma
Merhaba arkadaşlar, Fiat linea aracımıza pasif olan konsol tuşu ile cam indirme ve kaldırma uygulaması yaptım. Si̇zleri̇nde bu uygulamayı yapabi̇lmesi̇ açısından bu makaleyi̇ hazırladım umarım si̇zler i̇çi̇n faydalı olur.
Öncelikle aracınıza orjinal tuşu kullanarak cam indirme ve kaldırma uygulamasını gerçekleştirebilmeniz için Fiat Linea Arduino ile Cam Kaldırma ve İndirme Nasıl Yapılır ? isimli makalemizi okumuş ve araçlarınıza uygulamış olmanız gerekmektedir.

Öncelikle işlemimize sonradan takma veya orjinal araç teybinizi yerinden çıkartarak başlıyoruz.

Teybimizi söktükten sonra üst paneli alabilmeniz için teyp kasasını yukarıdaki görsel deki ok ile gösterilen vidaları sökerek çıkartınız.


Havalandırma ve konsol düğmelerine ait bölümü çıkartmak için yukarıdaki resimde ok ile gösterilen vidaları çıkartınız.

İlgili vidaları söktükten sonra konsol bolümünü yukardaki görseldeki gibi yukarı ve kendinize çekerek yerinden çıkartınız.

Yukardaki görseldeki gibi elektrik soketini sökmek için turuncu ile gösterilen tırnağa bastırarak kırmızı mandalı yeşil ok yönünde çekiniz.
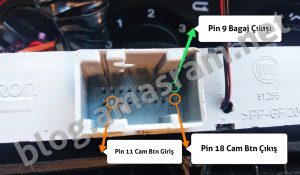
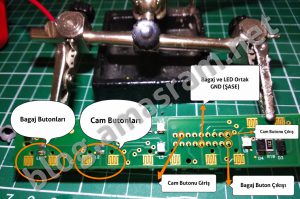
Pcb devre içerisinde buton ve çıkış pinleri yukarıdaki görseldeki gibidir. Bagaj butonu bastığınızda 9 numaralı pinden GND (Şase) iletilmektedir. Cam kontrolü için seçtiğimiz butonların çalışma prensibi bagaj butonundan farklı olup adi anahtar görevi görmekte ve araç tesisatı ile alakası bulunmamaktadır. Elektrik bağlantı soketinde 11 numaralı pin buton giriş 18 numaralı pin buton çıkış olarak kullanabilirsiniz.
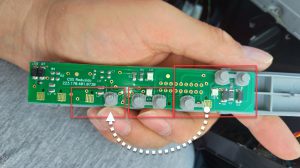
Aktif edeceğiniz cam kontrol butonunda kullanmak için yukarıda görselde daire içerisindeki 4 lü sinyal butonu altındaki 2 li slikon butonu kesebilir ve adet şeklinde kullanabilirsiniz.

Cam reziztansına ait tuşu ve aktif edeceğimiz tuşu arkasından tornavida yardımı ile çıkartıp İptal edilen butonumuzda basmayı engelleyen tırnakları maket bıçağı yardımı ile kesiniz.


Aktif edeceğiniz tuşun içi boş olduğundan yeni koyduğunuz lastik butonlara baskı yapması için çıkıntıya ihtiyacınız olacaktır ve bu işlemi sıcak silikon kürdan veya dal parçası yardımı ile yapabilirsiniz.

Eğer dişi pin temin edebilirseniz üstteki görseldeki gibi 11 ve 18 nolu boş olan pinlere giriş yapabilir ve kabloyu arduino cam modulüne iletebilirsiniz.

